Motorreductores
Un motorreductor es un mecanismo capaz de regular la velocidad del giro de un motor para que funcione a un ritmo determinado por medio de un tren de engranajes.
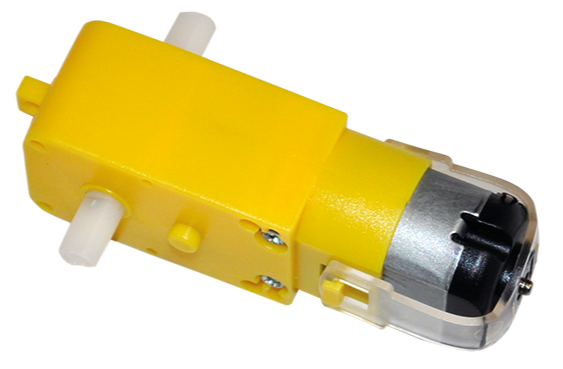
A la entrada de la caja reductora de un motorreductor (Fig. 1.1), se encuentra la flecha o eje del motor eléctrico que gira a una cierta velocidad, la cual se puede medir en RPM (revoluciones por minuto) que son el número de vueltas que el motor completa al girar su eje por cada minuto. Por otro lado, en la salida de la caja reductora se tiene una segunda flecha o eje, con una segunda velocidad mucho menor a la de entrada, esto se debe a que la caja reductora tiene una relación de engranes que permite reducir la cantidad de velocidad de entrada las veces que sea necesaria dependiendo su uso.

Fig. 1.1, Motorreductor abierto
A menor velocidad se incrementa el torque (la fuerza de rotación del motor).
Estos motores pueden ser bidireccionales, es decir, pueden girar en sentido horario o sentido antihorario normalmente con ayuda de otro componente llamado driver de control que recibe órdenes de una tarjeta de control programable.
Servomotores
Por otro lado, un servomotor es un actuador rotativo o motor, que permite un control preciso en términos de posición angular, aceleración y velocidad (capacidades que un motor normal no tiene). Este actuador utiliza un sensor como elemento de retroalimentación de su posición, como lo puede ser un potenciómetro.
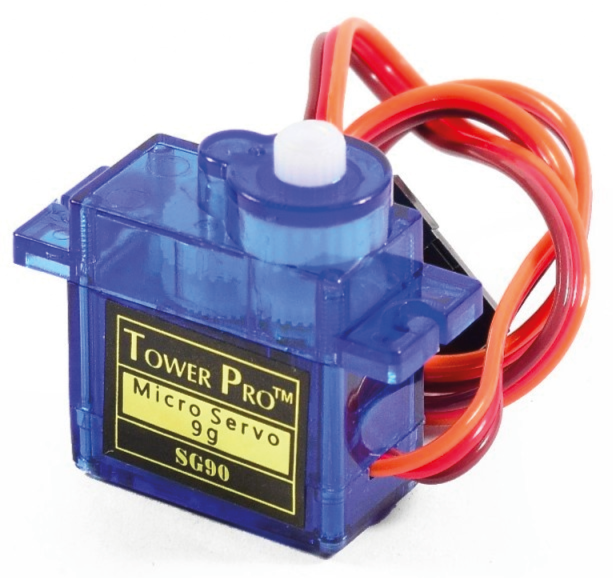
Los servomotores de rotación posicional se controlan mediante la modulación de ancho de pulso (PWM), generada por una tarjeta de control programable. Por lo general, un servomotor posicional sólo puede girar un total de 180° siendo 90° la posición neutra del motor; el servomotor puede llegar hasta 0° o hasta 180° haciendo recorridos en sentido horario o antihorario (a diferencia de un motorreductor que puede dar un giro de 360°), aunque también existen servomotores de rotación continua los cuales pueden dará un giro de 360°.
Los servomotores también cuentan con una caja de engranajes, pero a diferencia del motorreductor este actuador puede mantener una posición estable.
Otra característica notable, es que los servomotores ya cuentan con un sistema de control integrado, a diferencia del motorreductor que necesita de un driver externo para su control de rotación.
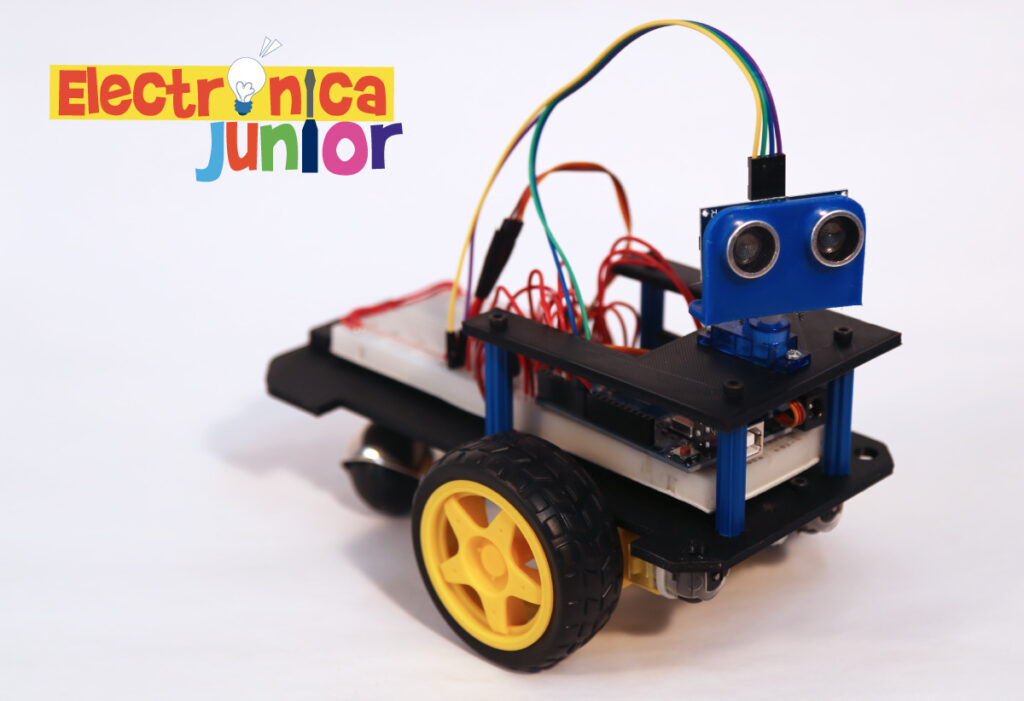
Una vez identificadas las principales características de estos motores, solo falta elegir el componente adecuado para el proyecto que desees realizar, incluso puedes combinar ambos componentes para la creación de uno solo; como el UltraWalley de la línea de kits MultiBots, que utiliza dos motorreductores para darle movimiento al vehículo, mientras que el servomotor da un giro de 180° cada que toma una dirección nueva para avanzar.
¿De cuánta utilidad te ha parecido este contenido?
¡Haz clic en una estrella para puntuarlo!
Promedio de puntuación 3.7 / 5. Recuento de votos: 7
Hasta ahora, ¡no hay votos!. Sé el primero en puntuar este contenido.